
[Image above] Stanford University engineers have used the sticky pads of geckos as inspiration for a hand-sized device that allows humans to scale a glass wall as effectively as Spiderman. Credit: Biomimetics and Dexterous Manipulation Lab, Stanford University
The sticky feet of geckos have long served as adhesive inspiration for the design of many smarter materials—from novel “geckel” pastes to self-cleaning surfaces. (April previously covered the topic back in August—click here for the post.)

Want to scale a wall like Spiderman? Credit: Roberto Verzo; Flickr; CC BY 2.0
Now, Stanford University engineers have used those same sticky gecko pads as inspiration for a hand-sized device that allows humans to scale a glass wall as effectively as Spiderman.
The work, published in the Journal of the Royal Society Interface, may seem a little silly at first, but the unique load-bearing characteristics of the gecko pad holds a great deal of real-world promise.
According to a Stanford news story, the synthetic adhesive developed by graduate student Elliot Hawkes and a team of engineers from the university’s Biomimetics and Dextrous Manipulation Lab is unlike others inspired by reptiles in it can withstand larger loads—which is enough to force others to fail—“very evenly” across the adhesive.
Those larger loads include humans up to 200 pounds. Hawkes himself has tested the “gecko gloves” on walls across the Stanford campus.
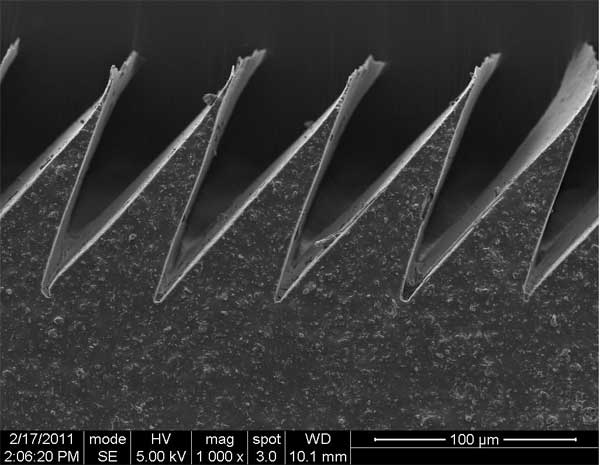
Microscope side view of adhesive wedges in unloaded state. Credit: Biomimetics and Dexterous Manipulation Lab, Stanford University
“It’s a lot of fun, but also a little weird, because it doesn’t feel like you should be gripping glass,” says Hawkes in the release. “You keep expecting to slip off, and when you don’t, it surprises you. It’s pretty exhilarating.”
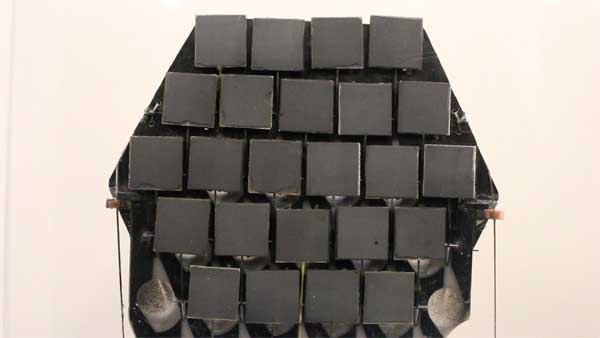
Developed in collaboration with the DARPA Z-Man program, the glove contains two dozen adhesive tiles with “sawtooth-shape polymer structures” that are about as wide as a strand of human hair (100 micrometers) and connected to degressive springs that, as stretched, become less stiff.
Coauthor Eric Eason describes the process of pulling the springs, and subsequent flattening of the sawtooth structures.
“When the pad first touches the surface, only the tips touch, so it’s not sticky,” he says. “But when the load is applied, and the wedges turn over and come into contact with the surface, that creates the adhesion force.”
And like its real-life reptilian counterpart, the gecko glove can go from sticky to smooth—attaching and detaching with little wasted energy, says Eason. It also maintains its adhesive strength, no matter the size. Other gecko-inspired adhesives haven’t been able to bear larger loads while maintain strength across a variety of smooth surfaces, including glass, plastic panels, wood, and metal.
So though the ability to scale structures like Spiderman is impressive, it isn’t the end goal.
Because it can be scaled up, the device could find application far beyond the glass walls of Stanford.
Credit: Biomimetics and Dexterous Manipulation Lab, Stanford University

Credit: Biomimetics and Dexterous Manipulation Lab, Stanford University

Credit: Biomimetics and Dexterous Manipulation Lab, Stanford University
“Some of the applications we’re thinking of involve manufacturing robots that lift large glass panels or liquid-crystal displays,” says Mark Cutkosky, who heads up the lab and is the senior author of the paper. “We’re also working on a project with NASA’s Jet Propulsion Laboratory to apply these to the robotic arms of spacecraft that could gently latch on to orbital space debris, such as fuel tanks and solar panels, and move it to an orbital graveyard or pitch it toward Earth to burn up.”
See Hawkes and the gloves in action in the video below, and tell us, in the comments, what you’d scale if given the chance (and a set of gecko gloves).
The paper is “Human climbing with efficiently scaled gecko-inspired dry adhesives” (DOI: 10.1098/rsif.2014.0675).
Credit: Stanford; YouTube