[Image above] Credit: Harvard

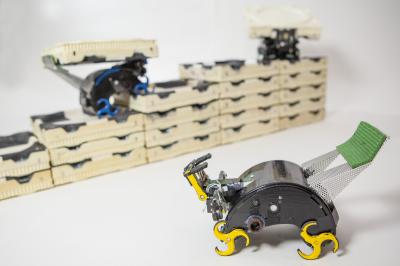
A team of engineers from Harvard developed termite-inspired robots designed to work collectively, but without a leader. Credit: AAAS, YouTube.
A group from Harvard reported in Science last Friday that they were able to design and program a cohort of robots to collectively but autonomously build complex structures—without reporting to a central command. The robots were inspired by and modeled after the collective efforts of insects, such as termites. Watch the one-minute video above to see the tiny robots work together.
According to the press release, Radhika Nagpal, senior author of the study and Harvard professor of computer science, said, “The key inspiration we took from termites is the idea that you can do something really complicated as a group, without a supervisor, and secondly that you can do it without everybody discussing explicitly what’s going on, but just by modifying the environment.”
While the bots each understand the overall design plan and follow a set of simple “traffic rules,” they don’t require a leader and don’t communicate with one another to complete the job. Instead, the robots are equipped with sensors to scan the environment, allowing them to detect where other robots and bricks are located and react to a dynamic environment. Because of their autonomy, the bots are scalable and versatile and have a wide range of potential applications, including extraterrestrial missions or in dangerous or unpleasant environments.
Other advanced robots inspired by nature—including a cheetah, ant, and fish—also debuted over the weekend at the annual AAAS meeting in Chicago, which concludes today.